An example would be to ping an ultrasonic sensor for a possible collision while at the same time navigating.
Ultrasonic sensor documentation.
The goal of this project is to help you understand how this sensor works.
Of course you can use a vibrator motor in place of buzzer and advance a lot more using your creativity.
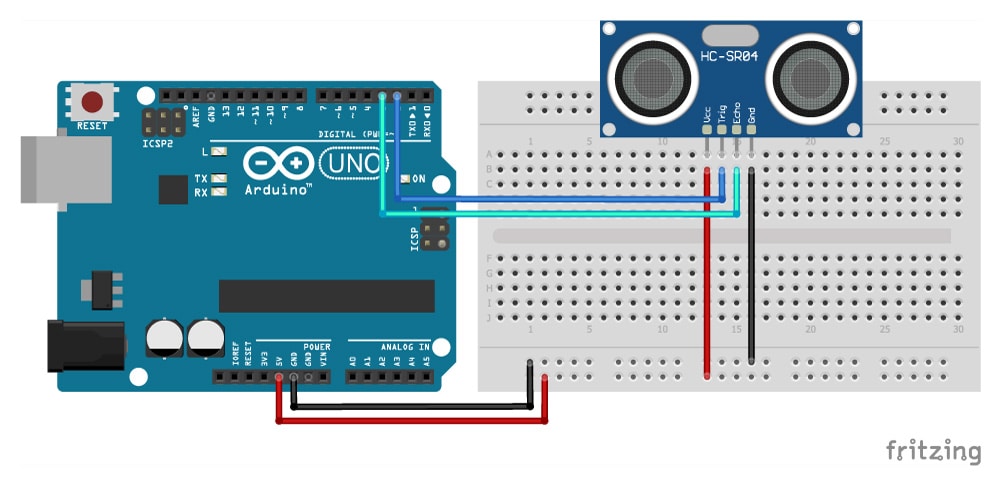
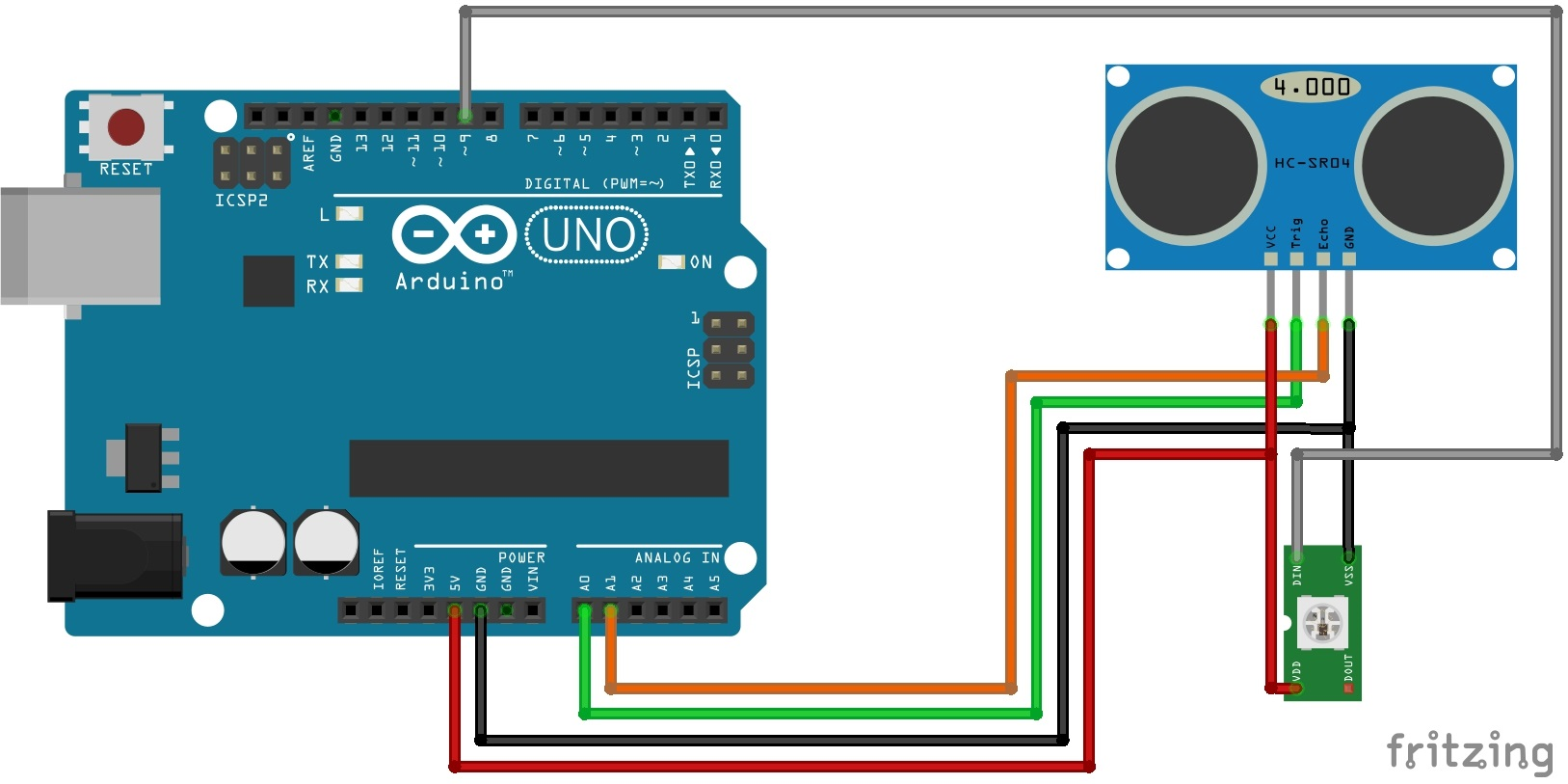
So here we provide an example on how to use the hc sr04 ultrasonic sensor with the arduino.
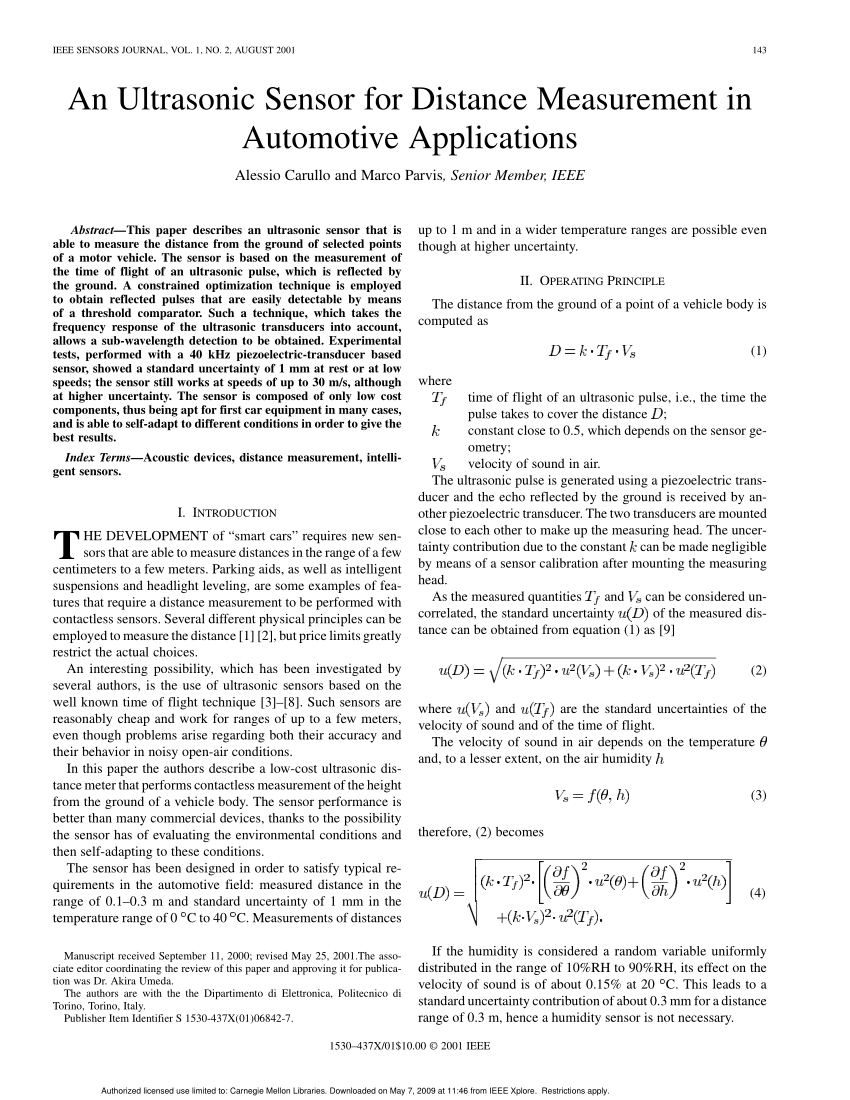
It offers excellent non contact range detection with high accuracy and stable readings in an easy to use package from 2 cm to 400 cm or 1 to 13 feet.
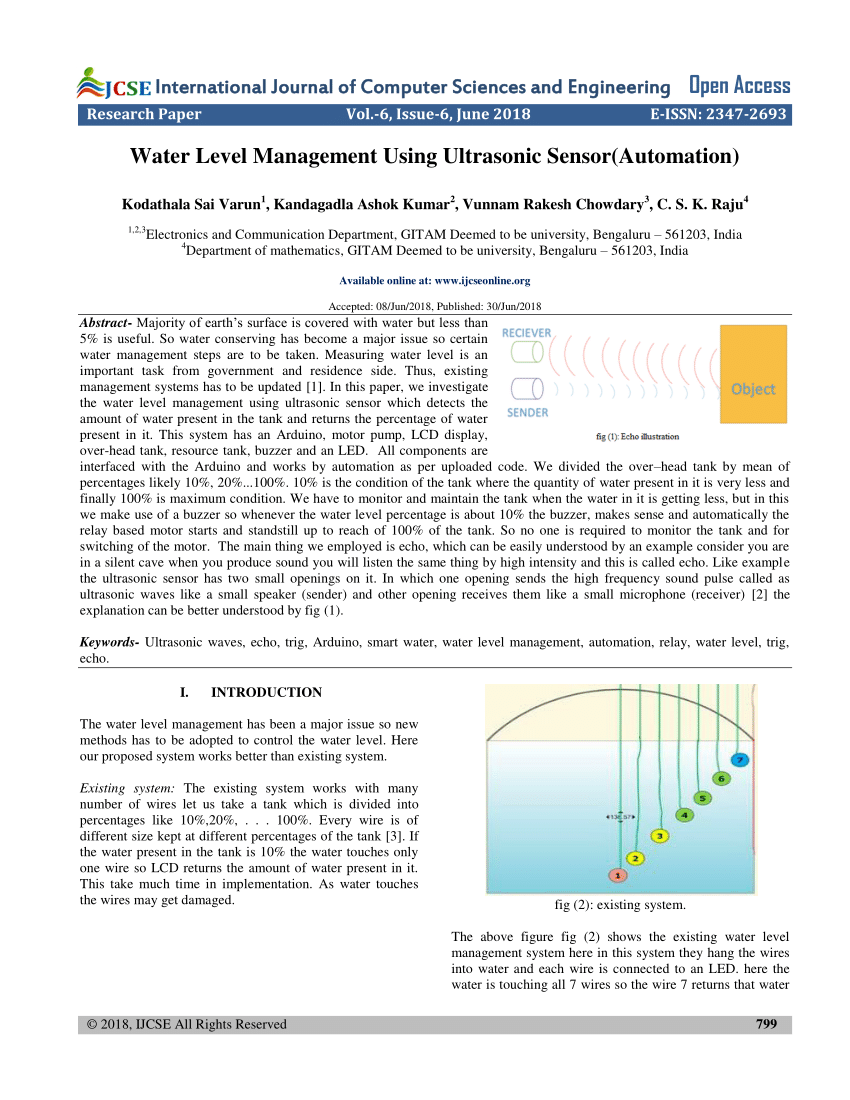
The hc sr04 ultrasonic sensor uses sonar to determine the distance of an object just like the bats do.
Ultrasonic sensors can detect movement of targets and measure the distance to them in many automated factories and process plants.
They can sense the edge of material as part of a web guiding system.
If you are interested in underwater applications with ultrasonics.
Our sensors range from 20cm to our only 16 5m sensor our cargo detection sensor.
Be aware that because the ping timer method uses timer2 other features or libraries that also use timer2 would be effected.
In a reflective model ultrasonic sensor a single oscillator emits and receives.
The ultrasonic sensor meets the ip67 water intrusion standard and matches standard electrical 3 4 inch pvc pipe fittings.
This outdoor sensor provides very short to long distance detection and ranging in a compact robust pvc housing.
Ultrasonic sensor maximum range.
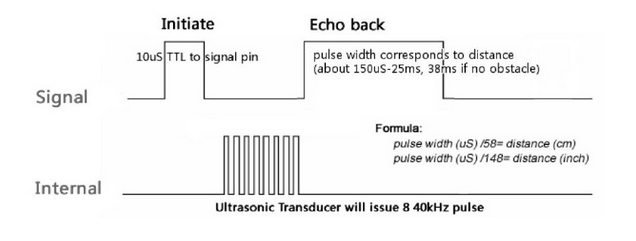
Ultrasonic sensors measure the distance to the target by measuring the time between the emission and reception.
The weather resistant hrxl maxsonar wr is a rugged ultrasonic sensor component module.
This allows a properly developed sketch to multitask.
This being said we do supply documentation for customers who would still like to test our sensors underwater.
From 2cm to 400 cm or 1 to 13 feet.
In this project the ultrasonic sensor reads and writes the distance to an object in the serial monitor.
This smart stick will have an ultrasonic sensor to sense distance from any obstacle ldr to sense lighting conditions and a rf remote using which the blind man could remotely locate his stick all the feedbacks will be given to the blind man through a buzzer.
Sensors can have an on or off digital output for detecting the movement of objects or an analog output proportional to distance.
An optical sensor has a transmitter and receiver whereas an ultrasonic sensor uses a single ultrasonic element for both emission and reception.